Introduction
Spatial maths capability underpins all of robotics and robotic vision. It provides the means to describe the relative position and orientation of objects in 2D or 3D space. This package provides Python classes and functions to represent, print, plot, manipulate and covert between such representations. This includes relevant mathematical objects such as rotation matrices \(\mat{R} \in \SO{2}, \SO{3}\), homogeneous transformation matrices \(\mat{T} \in \SE{2}, \SE{3}\), unit quaternions \(\q \in \mathrm{S}^3\), and twists \(S \in \se{2}, \se{3}\).
For example, we can create a rigid-body transformation that is a rotation about the x-axis of 30 degrees:
>>> from spatialmath.base import *
>>> rotx(30, 'deg')
array([[ 1. , 0. , 0. ],
[ 0. , 0.866, -0.5 ],
[ 0. , 0.5 , 0.866]])
which results in a NumPy \(4 \times 4\) array that belongs to the group \(\SE{3}\). We could also create a class instance:
>>> from spatialmath import *
>>> T = SE3.Rx(30, 'deg')
>>> type(T)
<class 'spatialmath.pose3d.SE3'>
>>> print(T)
1 0 0 0
0 0.866 -0.5 0
0 0.5 0.866 0
0 0 0 1
which is internally represented as a \(4 \times 4\) NumPy array.
While functions and classes can provide similar functionality the class provide the benefits of:
type safety, it is not possible to mix a 3D rotation matrix with a 2D rigid-body motion, even though both are represented by a \(3 \times 3\) matrix
operator overloading allows for convenient and readable expression of algorithms
representing not a just a single value, but a sequence of values, which are handled by the operators with implicit broadcasting of values
Spatial math classes
The package provides classes to represent pose and orientation in 3D and 2D space:
Represents |
in 3D |
in 2D |
|---|---|---|
pose |
|
|
orientation |
|
|
Additional classes include:
Quaterniona general quaternion, and parent class toUnitQuaternionLine3to represent a line in 3D spacePlaneto represent a plane in 3D space
These classes abstract, and implement appropriate operations, for the following groups:
Group |
Name |
Class |
|---|---|---|
\(\SE{3}\) |
rigid-body transformaton in 3D |
|
\(\se{3}\) |
twist in 3D |
|
\(\SO{3}\) |
orientation in 3D |
|
\(\mathrm{S}^3\) |
unit quaternion |
|
\(\SE{2}\) |
rigid-body transformaton in 2D |
|
\(\se{2}\) |
twist in 2D |
|
\(\SO{2}\) |
orientation in 2D |
|
\(\mathbb{H}\) |
quaternion |
|
\(P^5\) |
Plücker lines |
|
\(M^6\) |
spatial velocity |
|
\(M^6\) |
spatial acceleration |
|
\(F^6\) |
spatial force |
|
\(F^6\) |
spatial momentum |
|
\(\mathbb{R}^{6 \times 6}\) |
spatial inertia |
|
In addition to the merits of classes outlined above, classes ensure that the numerical value is always valid because the constraints (eg. orthogonality, unit norm) are enforced when the object is constructed. For example:
>>> SE3(np.zeros((4,4)))
Traceback (most recent call last):
.
.
AssertionError: array must have valid value for the class
Type safety and type validity are particularly important when we deal with a sequence of values. In robotics we frequently deal with a multiplicity of objects (poses, cameras), or a trajectory of objects moving over time. However a list of these items, for example:
>>> X = [SE3.Rx(0), SE3.Rx(0.2), SE3.Rx(0.4), SE3.Rx(0.6)]
has the type list and the elements are not guaranteed to be homogeneous, ie. a list could contain a mixture of classes.
This requires careful coding, or additional user code to check the validity of all elements in the list.
We could create a NumPy array of these objects, the upside being it could be more than one-dimensional, but again NumPy does not
enforce homogeneity of objects within an array (with dtype='O').
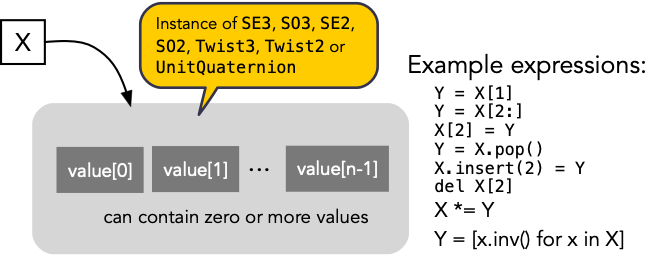
The Spatial Math package give these classes list super powers so that, for example, a single SE3 object can contain a sequence of SE(3) values:
>>> from spatialmath import *
>>> X = SE3.Rx([0, 0.2, 0.4, 0.6])
>>> len(X)
4
>>> print(X[1])
1 0 0 0
0 0.9801 -0.1987 0
0 0.1987 0.9801 0
0 0 0 1
The classes form a rich hierarchy
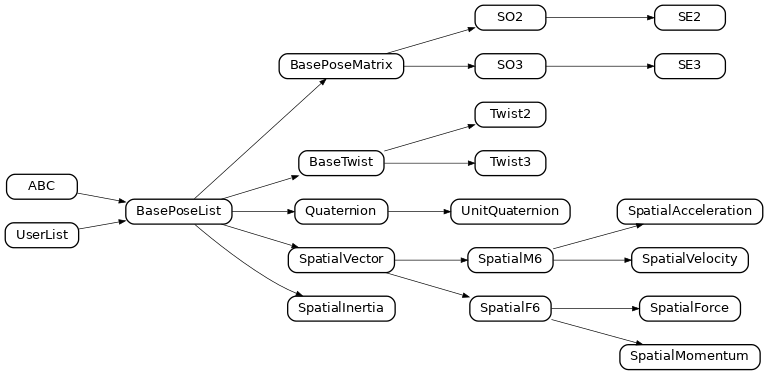
Ultimately they all inherit from collections.UserList and have all the functionality of Python lists, and this is discussed further in
section List capability
The pose objects are a list subclass so we can index it or slice it as we
would a list, but the result always belongs to the class it was sliced from.
Operators for pose objects
Group operations
The classes represent mathematical groups, and the group arithmetic rules are enforced.
The operator * denotes composition and the result will be of the same type as the operand:
>>> from spatialmath import *
>>> T = SE3.Rx(0.3)
>>> type(T)
<class 'spatialmath.pose3d.SE3'>
>>> X = T * T
>>> type(X)
<class 'spatialmath.pose3d.SE3'>
The implementation of composition depends on the class:
for SO(n) and SE(n) composition is imatrix multiplication of the underlying matrix values,
for unit-quaternions composition is the Hamilton product of the underlying vector value,
for twists it is the logarithm of the product of exponentiating the two twists
The ** operator denotes repeated composition, so the exponent must be an integer. If the exponent is negative, repeated multiplication
is performed and then the inverse is taken.
The group inverse is given by the inv() method:
>>> from spatialmath import *
>>> T = SE3.Rx(0.3)
>>> T * T.inv()
SE3(array([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]]))
and / denotes multiplication by the inverse:
>>> from spatialmath import *
>>> T = SE3.Rx(0.3)
>>> T / T
SE3(array([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]]))
Vector transformation
The classes SE3, SO3, SE2, SO2 and UnitQuaternion support vector transformation when
premultiplying a vector (or a set of vectors columnwise in a NumPy array) using the * operator.
This is either rotation about the origin (for SO3, SO2 and UnitQuaternion) or rotation and translation (SE3, SE2).
The implementation depends on the class of the object involved:
for
UnitQuaternionthis is performed directly using Hamilton products \(\q \circ \mathring{v} \circ \q^{-1}\).for
SO3andSO2this is a matrix-vector productfor
SE3andSE2this is a matrix-vector product with the vectors being first converted to homogeneous form, and the result converted back to Euclidean form.
>>> from spatialmath import *
>>> v = [1, 2, 3]
>>> SO3.Rx(0.3) * v
array([[1. ],
[1.0241],
[3.457 ]])
>>> SE3.Rx(0.3) * v
array([[1. ],
[1.0241],
[3.457 ]])
>>> UnitQuaternion.Rx(0.3) * v
array([1. , 1.0241, 3.457 ])
Non-group operations
Addition, subtraction and scalar multiplication are not defined group operations so the result will be a NumPy array rather than a class. The operations are performed elementwise, for example:
>>> from spatialmath import *
>>> T = SE3.Rx(0.3)
>>> T - T
array([[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.]])
or, in the case of a scalar, broadcast to each element:
>>> from spatialmath import *
>>> T = SE3()
>>> T
SE3(array([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]]))
>>> T - 1
array([[ 0., -1., -1., -1.],
[-1., 0., -1., -1.],
[-1., -1., 0., -1.],
[-1., -1., -1., 0.]])
>>> 2 * T
array([[2., 0., 0., 0.],
[0., 2., 0., 0.],
[0., 0., 2., 0.],
[0., 0., 0., 2.]])
The exception is the Quaternion class which supports these since a
quaternion is a ring not a group:
>>> from spatialmath import *
>>> q = Quaternion([1, 2, 3, 4])
>>> 2 * q
Quaternion(array([2, 4, 6, 8]))
Compare this to the unit quaternion case:
>>> from spatialmath import *
>>> q = UnitQuaternion([1, 2, 3, 4])
>>> q
UnitQuaternion(array([0.1826, 0.3651, 0.5477, 0.7303]))
>>> 2 * q
Quaternion(array([0.3651, 0.7303, 1.0954, 1.4606]))
Noting that unit quaternions are denoted by double angle bracket delimiters of their vector part, whereas a general quaternion uses single angle brackets. The product of a general quaternion and a unit quaternion is always a general quaternion.
Displaying values
Each class has a compact text representation via its __repr__ method and its
str() method. The printline() methods prints a single-line for tabular
listing to the console, file and returns a string:
>>> from spatialmath import *
>>> X = SE3.Rand()
>>> _ = X.printline()
t = -0.0759, 0.901, 0.623; rpy/zyx = 38.8°, -25.6°, -147°
The classes SE3, SO3, SE2 and SO2 can provide colorized text output to the console:
>>> T = SE3()
>>> T.print()

with rotational elements in red, translational elements in blue and constants in grey.
The foreground and background colors can be controlled using the following
class variables for the BasePoseMatrix subclasses
Variable |
Default |
Description |
|---|---|---|
_color |
True |
Enable all colorization |
_rotcolor |
‘red’ |
Foreground color of rotation submatrix |
_transcolor |
‘blue’ |
Foreground color of rotation submatrix |
_constcolor |
‘grey_50’ |
Foreground color of matrix constant elements |
_bgcolor |
None |
Background color of matrix |
_indexcolor |
(None, ‘yellow_2’) |
Foreground, background color of index tag |
_format |
‘{:< 12g}’ |
Format string for each matrix element |
_suppress_small |
True |
Suppress small values, set to zero |
_suppress_tol |
100 |
Threshold for small values in eps units |
_ansimatrix |
False |
Display as a matrix with brackets |
For example:
>>> SE3._rotcolor = 'green' # rotation part in green
or to supress color, perhaps for inclusion in documentation:
>>> SE3._color = False
Graphics
Each class has a plot method that displays the corresponding pose as a coordinate frame, for example:
>>> X = SE3.Rand()
>>> X.plot()
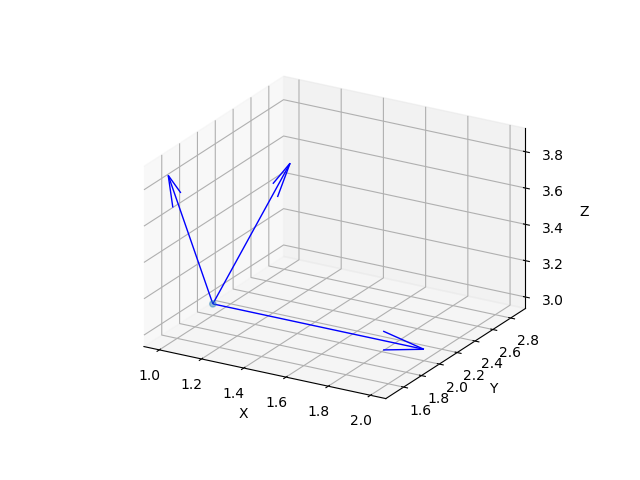
and there are many display options.
The animate method animates the motion of the coordinate frame from the null-pose, for example:
>>> X = SE3.Rand()
>>> X.animate(frame='A', arrow=False)
Constructors
The constructor for each class can accept:
no arguments, in which case the identity element is created:
>>> from spatialmath import *
>>> UnitQuaternion()
UnitQuaternion(array([1., 0., 0., 0.]))
>>> SE3()
SE3(array([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]]))
class specific values, eg.
SE2(x, y, theta)orSE3(x, y, z), for example:
>>> from spatialmath import *
>>> SE2(1, 2, 0.3)
SE2(array([[ 0.9553, -0.2955, 1. ],
[ 0.2955, 0.9553, 2. ],
[ 0. , 0. , 1. ]]))
>>> UnitQuaternion([1, 0, 0, 0])
UnitQuaternion(array([1., 0., 0., 0.]))
a numeric value for the class as a NumPy array or a 1D list or tuple which will be checked for validity:
>>> from spatialmath import *
>>> import numpy as np
>>> SE2(np.identity(3))
SE2(array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]))
a list of numeric values, each of which will be checked for validity:
>>> from spatialmath import *
>>> import numpy as np
>>> X = SE2([np.identity(3), np.identity(3), np.identity(3), np.identity(3)])
>>> X
SE2([
array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]),
array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]),
array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]),
array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]) ])
>>> len(X)
4
Other constructors are implemented as class methods and are common to SE3,
SO3, Twist3, SE2, SO2 Twist2 and UnitQuaternion and
begin with an uppercase letter:
Constructor |
Meaning |
|---|---|
Rx |
Pure rotation about the x-axis |
Ry |
Pure rotation about the y-axis |
Rz |
Pure rotation about the z-axis |
RPY |
specified as roll-pitch-yaw angles |
Eul |
specified as Euler angles |
AngVec |
specified as rotational axis and rotation angle |
Rand |
random rotation |
Exp |
specified as se(2) or se(3) matrix |
empty |
no values |
Alloc |
N identity values |
List capability
Each of these object classes has UserList as a base class which means it inherits all the functionality of
a Python list
>>> from spatialmath import *
>>> import numpy as np
>>> R = SO3.Rx(0.3)
>>> len(R)
1
>>> R = SO3.Rx(np.arange(0, 2*np.pi, 0.2))
>>> len(R)
32
>>> R[0]
SO3(array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]))
>>> R[-1]
SO3(array([[ 1. , 0. , 0. ],
[ 0. , 0.9965, 0.0831],
[ 0. , -0.0831, 0.9965]]))
>>> R[2:4]
SO3([
array([[ 1. , 0. , 0. ],
[ 0. , 0.9211, -0.3894],
[ 0. , 0.3894, 0.9211]]),
array([[ 1. , 0. , 0. ],
[ 0. , 0.8253, -0.5646],
[ 0. , 0.5646, 0.8253]]) ])
where each item is an object of the same class as that it was extracted from.
Slice notation is also available, eg. R[0:-1:3] is a new SO3 instance containing every third element of R.
In particular it supports iteration which allows looping and comprehensions:
>>> from spatialmath import *
>>> import numpy as np
>>> R = SO3.Rx(np.arange(0, 2*np.pi, 0.2))
>>> len(R)
32
>>> eul = [x.eul() for x in R]
>>> len(eul)
32
>>> eul[10]
array([-1.5708, 2. , 1.5708])
Useful functions that be used on such objects include
Method |
Operation |
|---|---|
|
Clear all elements, object now has zero length |
|
Append a single element |
|
|
|
Iterate over the elments |
|
Append a list of same type pose objects |
|
Insert an element |
|
Return the number of elements |
|
Map a function of each element |
|
Remove first element and return it |
|
Index from a slice object |
|
Iterate over the elments |
Vectorization
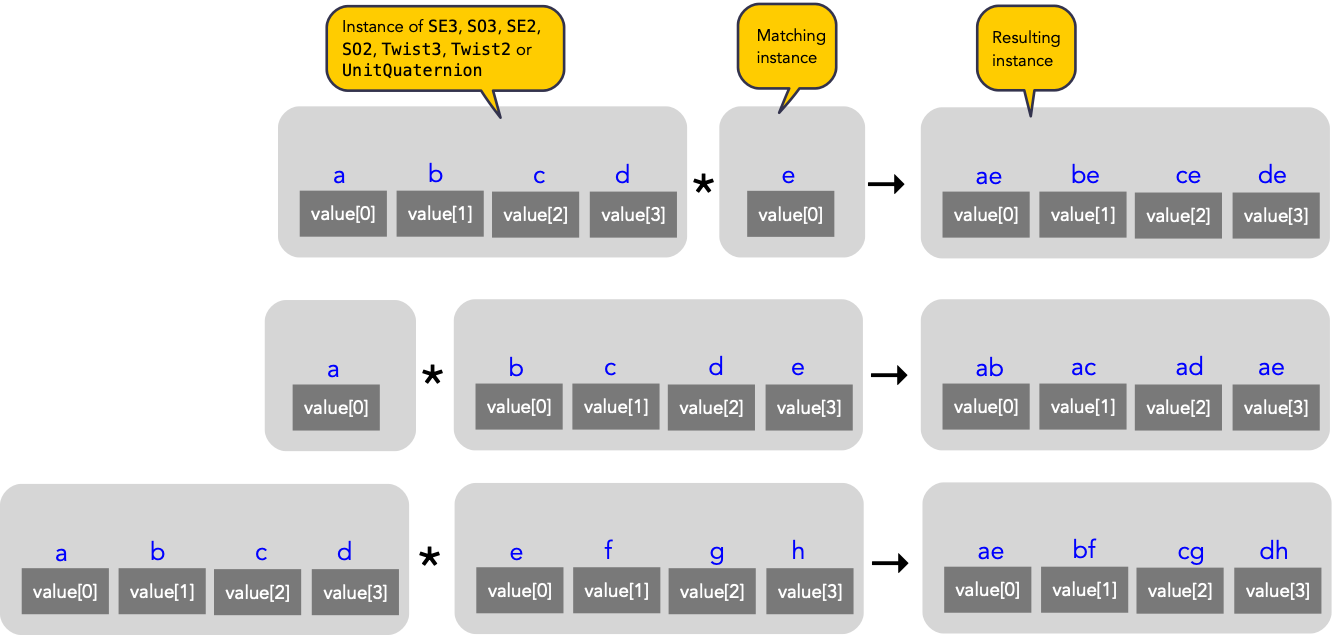
For most methods, if applied to an object that contains N elements, the result will be the appropriate return object type with N elements. In MATLAB this is referred to as vectorization and in NumPy as broadcasting.
Most binary operations are vectorized: *, *=, **, /, /=, +, +=, -, -=,
==, !=. For the case:
Z = X op Y
the lengths of the operands and the results are given by
operands |
results |
||
|---|---|---|---|
len(X) |
len(Y) |
len(Z) |
results |
1 |
1 |
1 |
Z = X op Y |
1 |
M |
M |
Z[i] = X op Y[i] |
M |
1 |
M |
Z[i] = X[i] op Y |
M |
M |
M |
Z[i] = X[i] op Y[i] |
Any other combination of lengths is not allowed and will raise a ValueError exception.
In addition:
Pluckerobjects support the^and|operators to test intersection and parallelity respectively.SpatialVectorsubclass objects support the^operator to indicate the spatial vector cross product.
Symbolic operations
The Toolbox supports SymPy which provides powerful symbolic support for Python and it works well in conjunction with NumPy, ie. a NumPy array can contain symbolic elements. Many the Toolbox methods and functions contain extra logic to ensure that symbolic operations work as expected. While this also adds to the overhead it means that for the user, working with symbols is as easy as working with numbers. For example:
>>> from spatialmath import *
>>> import spatialmath.base.symbolic as sym
>>> theta = sym.symbol('theta')
>>> SE3.Rx(theta)
SE3(array([[1, 0, 0, 0],
[0, cos(theta), -sin(theta), 0],
[0, sin(theta), cos(theta), 0],
[0, 0, 0, 1]], dtype=object))
SymPy allows any expression to be converted to runnable code in a variety of languages including C, Python and Octave/MATLAB.
Implementation
Operator |
dunder method |
|---|---|
|
__mul__ , __rmul__ |
|
__imul__ |
|
__truediv__ |
|
__itruediv__ |
|
__pow__ |
|
__ipow__ |
|
__add__, __radd__ |
|
__iadd__ |
|
__sub__, __rsub__ |
|
__isub__ |
|
__eq__ |
|
__ne__ |
This online documentation includes just the method shown in bold. The other related methods all invoke that method.
Low-level spatial math
The classes above abstract the base package which represent the spatial-math
types as 1D and 2D arrays implemented by NumPy n-dimensional arrays - the
ndarray class.
Spatial object |
equivalent class |
NumPy ndarray.shape |
|---|---|---|
2D rotation SO(2) |
SO2 |
(2,2) |
2D pose SE(2) |
SE2 |
(3,3) |
3D rotation SO(3) |
SO3 |
(3,3) |
3D poseSE3 SE(3) |
SE3 |
(3,3) |
3D rotation |
UnitQuaternion |
(4,) |
n/a |
Quaternion |
(4,) |
Note
SpatialVector and Line3 objects have no equivalent in the
base package.
Inputs to functions in this package are either floats, lists, tuples or numpy.ndarray objects describing vectors or arrays.
NumPy arrays have a shape described by a shape tuple which is a list of the
dimensions. Typically all ndarray vectors have the shape (N,), that is,
they have only one dimension. The @ product of an (M,N) array and a (N,)
vector is an (M,) vector.
A numpy column vector has shape (N,1) and a row vector
has shape (1,N) but functions also accept row (1,N) and column (N,1)
where a vector argument is required.
Warning
For a user transitioning from MATLAB the most significant differences are:
the use of 1D arrays – all MATLAB arrays have two dimensions, even if one of them is equal to one.
Iterating over a 1D NumPy array (N,) returns consecutive elements
Iterating over a 2D NumPy array is done by row, not columns as in MATLAB.
Iterating over a row vector
(1,N)returns the entire rowIterating a column vector
(N,1)returns consecutive elements (rows).
Note
Functions that require vector can be passed a list, tuple or numpy.ndarray for a vector – described in the documentation as being of type array_like.
This toolbox documentation refers to NumPy arrays succinctly as:
ndarray(N)for a 1D array of lengthNndarray(N,M)for a 2D array of dimension \(N \times M\).
The classes SO2, SE2, SO3, SE3, UnitQuaternion can operate
conveniently on lists but the base functions do not support this. If you
wish to work with these functions and create lists of pose objects you could
keep the numpy arrays in high-order numpy arrays (ie. add an extra dimensions),
or keep them in a list, tuple or any other Python container described in the
high-level spatial math section <#high-level-classes>`_.
Let’s show a simple example:
1>>> from spatialmath.base import *
2>>> rotx(0.3)
3array([[ 1. , 0. , 0. ],
4 [ 0. , 0.9553, -0.2955],
5 [ 0. , 0.2955, 0.9553]])
6>>> rotx(30, unit='deg')
7array([[ 1. , 0. , 0. ],
8 [ 0. , 0.866, -0.5 ],
9 [ 0. , 0.5 , 0.866]])
10>>> R = rotx(0.3) @ roty(0.2)
11>>> R
12array([[ 0.9801, 0. , 0.1987],
13 [ 0.0587, 0.9553, -0.2896],
14 [-0.1898, 0.2955, 0.9363]])
At line 1 we import all the base functions into the current namespace. In line
10 when we multiply the matrices we need to use the @ operator to perform
matrix multiplication. The * operator performs element-wise multiplication,
which is equivalent to the MATLAB .* operator.
We also support multiple ways of passing vector information to functions that require it:
as separate positional arguments
>>> from spatialmath.base import *
>>> transl2(1, 2)
array([[1., 0., 1.],
[0., 1., 2.],
[0., 0., 1.]])
as a list or a tuple
>>> from spatialmath.base import *
>>> transl2( [1,2] )
array([[1., 0., 1.],
[0., 1., 2.],
[0., 0., 1.]])
>>> transl2( (1,2) )
array([[1., 0., 1.],
[0., 1., 2.],
[0., 0., 1.]])
or as a NumPy array
>>> from spatialmath.base import *
>>> transl2( np.array([1,2]) )
array([[1., 0., 1.],
[0., 1., 2.],
[0., 0., 1.]])
There is a single module that deals with quaternions, regular quaternions and unit quaternions. In both cases, the representation is a NumPy array of four elements. As above, functions can accept a NumPy array, a list, dict or NumPy row or column vectors.
>>> from spatialmath.base import *
>>> q = qqmul([1,2,3,4], [5,6,7,8])
>>> q
array([-60., 12., 30., 24.])
>>> qprint(q)
-60.0000 < 12.0000, 30.0000, 24.0000 >
>>> qnorm(q)
72.24956747275377
Functions exist to convert to and from SO(3) rotation matrices and a minimal 3-vector quaternion representation. The latter is often used for SLAM and bundle adjustment applications, being a minimal representation of orientation.
Graphics
If matplotlib is installed then we can add 2D coordinate frames to a figure in a variety of styles:
1 >>> trplot2( transl2(1,2), frame='A', rviz=True, width=1)
2 >>> trplot2( transl2(3,1), color='red', arrow=True, width=3, frame='B')
3 >>> trplot2( transl2(4, 3)@trot2(math.pi/3), color='green', frame='c')
4 >>> plt.grid(True)
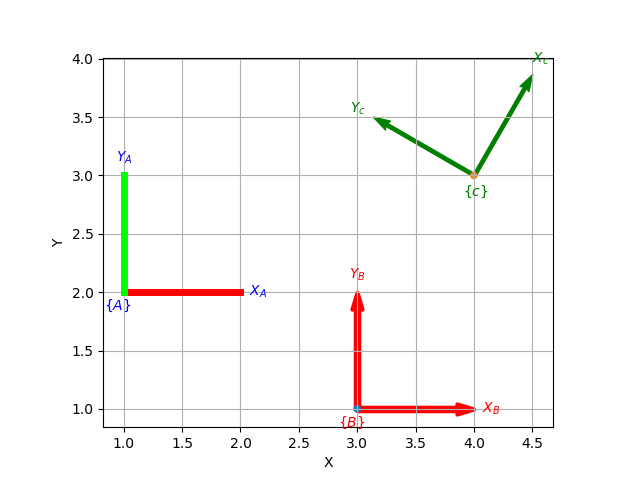
Output of trplot2
If a figure does not yet exist one is added. If a figure exists but there is no 2D axes then one is added. To add to an existing axes you can pass this in using the axes argument. By default the frames are drawn with lines or arrows of unit length. Autoscaling is enabled.
Similarly, we can plot 3D coordinate frames in a variety of styles:
1 >>> trplot( transl(1,2,3), frame='A', rviz=True, width=1, dims=[0, 10, 0, 10, 0, 10])
2 >>> trplot( transl(3,1, 2), color='red', width=3, frame='B')
3 >>> trplot( transl(4, 3, 1)@trotx(math.pi/3), color='green', frame='c', dims=[0,4,0,4,0,4])
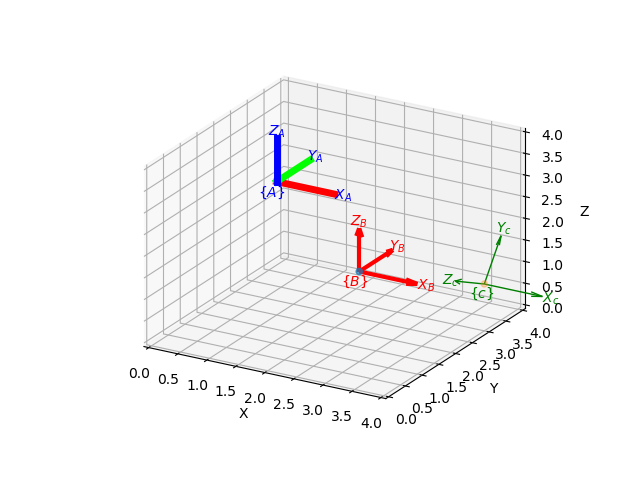
Output of trplot
The dims option in lines 1 and 3 sets the workspace dimensions. Note that the last set value is what is displayed.
Depending on the backend you are using you may need to include
>>> plt.show()
Symbolic support
Some functions have support for symbolic variables, for example:
>>> from spatialmath.base import *
>>> import spatialmath.base.symbolic as sym
>>> theta = sym.symbol('theta')
>>> print(rotx(theta))
[[1 0 0]
[0 cos(theta) -sin(theta)]
[0 sin(theta) cos(theta)]]
The resulting NumPy array is an array of symbolic objects not numbers – the constants are also symbolic objects. You can slice out the elements of the matrix
>>> from spatialmath.base import *
>>> import spatialmath.base.symbolic as sym
>>> theta = sym.symbol('theta')
>>> T = rotx(theta)
>>> a = T[0,0]
>>> a
1
>>> type(a)
<class 'int'>
>>> a = T[1,1]
>>> a
cos(theta)
>>> type(a)
cos
We see that the symbolic constants have been converted back to Python numeric types.
Similarly when we assign an element or slice of the symbolic matrix to a numeric value, they are converted to symbolic constants on the way in.
>>> from spatialmath.base import *
>>> import spatialmath.base.symbolic as sym
>>> theta = sym.symbol('theta')
>>> T = trotx(theta)
>>> T[0,3] = 22
>>> print(T)
[[1 0 0 22]
[0 cos(theta) -sin(theta) 0]
[0 sin(theta) cos(theta) 0]
[0 0 0 1]]
Warning
You can’t write a symbolic value directly into a floating point matrix (ie.
one whose dtype is np.float64 or similar). The array must be first converted
to object type using T = T.astype('O').
Note
Not all functions support symbolic operations. For those that do, this is noted in the last line of the docstring: SymPy: support
Relationship to MATLAB tools
This package replicates, as much as possible, the functionality of the Spatial Math Toolbox for MATLAB® which underpins the Robotics Toolbox for MATLAB®. It comprises:
the classic functions (which date back to the origin of the Robotics Toolbox for MATLAB) such as
rotx,trotz,eul2tretc. which can be imported from thebasepackage:>>> from spatialmath.base import rotx, trotx
and works with NumPy arrays. This package also includes a set of functions, not present in the MATLAB version, to handle quaternions, unit-quaternions which are represented as 4-element NumPy arrays, and twists.
the classes (which appeared in Robotics Toolbox for MATLAB release 10 in 2017) such as
SE3,UnitQuaternionetc. The only significant difference is that the MATLABTwistclass is now calledTwist3.
The design considerations included:
being as similar as possible to the MATLAB Toolbox function names and semantics
while balancing the tension of being as Pythonic as possible
using Python keyword arguments to replace the MATLAB Toolbox string options supported using
tb_optparse()using NumPy arrays internally to represent rotation and homogeneous transformation matrices, quaternions, twists and vectors
allowing all functions that accept a vector can accept a list, tuple, or NumPy array
allowing a class instance can hold a sequence of elements, they are polymorphic with lists, which can be used to represent trajectories or time sequences
having classes that are generally polymorphic, ie. they share many common constructor options and methods
Note
None of the functions in the base package are vectorized, whereas many of the MATLAB
equivalents are. Vectorization is done by the classes.
Creating a MATLAB-like environment in Python
We can create a MATLAB-like environment by
>>> from spatialmath import *
>>> from spatialmath.base import *
which has the familiar classic functions like rotx and rpy2r available, as well as classes like SE3
R = rotx(0.3)
R2 = rpy2r(0.1, 0.2, 0.3)
T = SE3(1, 2, 3)