Geometry
Created on Sun Jul 5 09:42:30 2020
@author: corkep
- class Ellipse(radii=None, E=None, centre=(0, 0), theta=None)[source]
Bases:
object- classmethod FromPerimeter(p)[source]
Create an ellipse that fits a set of perimeter points
- Parameters:
p (ndarray(2,N)) – a set of 2D perimeter points
- Returns:
an ellipse instance
- Return type:
Example:
>>> from spatialmath import Ellipse >>> import numpy as np >>> eref = Ellipse(radii=(1, 2), theta=np.pi / 4, centre=[3, 4]) >>> perim = eref.points() >>> print(perim.shape) (2, 20) >>> Ellipse.FromPerimeter(perim) Ellipse(radii=[1. 2.], centre=[3. 4.], theta=0.7853981633974318)
- Seealso:
- classmethod FromPoints(p)[source]
Create an equivalent ellipse from a set of interior points
- Parameters:
p (ndarray(2,N)) – a set of 2D interior points
- Returns:
an ellipse instance
- Return type:
Computes the ellipse that has the same inertia as the set of points.
- Seealso:
- classmethod Polynomial(e, p=None)[source]
Create an ellipse from polynomial
- Parameters:
e (arraylike(4) or arraylike(5)) – polynomial coeffients \(e\) or \(\eta\)
p (array_like(2), optional) – point to set scale
- Returns:
an ellipse instance
- Return type:
An ellipse can be specified by a polynomial \(\vec{e} \in \mathbb{R}^6\)
\[e_0 x^2 + e_1 y^2 + e_2 xy + e_3 x + e_4 y + e_5 = 0\]or \(\vec{\epsilon} \in \mathbb{R}^5\) where the leading coefficient is implicitly one
\[x^2 + \epsilon_1 y^2 + \epsilon_2 xy + \epsilon_3 x + \epsilon_4 y + \epsilon_5 = 0\]In this latter case, position, orientation and aspect ratio of the ellipse will be correct, but the overall scale of the ellipse is not determined. To correct this, we can pass in a single point
pthat we know lies on the perimeter of the ellipse.Example:
>>> from spatialmath import Ellipse >>> Ellipse.Polynomial([0.625, 0.625, 0.75, -6.75, -7.25, 24.625]) Ellipse(radii=[1. 2.], centre=[3. 4.], theta=0.7853981633974483)
- Seealso:
- __init__(radii=None, E=None, centre=(0, 0), theta=None)[source]
Create an ellipse
- Parameters:
radii (arraylike(2), optional) – radii of ellipse, defaults to None
E (ndarray(2,2), optional) – 2x2 matrix describing ellipse, defaults to None
centre (arraylike(2), optional) – centre of ellipse, defaults to (0, 0)
theta (float, optional) – orientation of ellipse, defaults to None
- Raises:
ValueError – bad parameters
The ellipse shape can be specified by
radiiandthetaor by a symmetric 2x2 matrixE.Internally the ellipse is represented by a symmetric matrix \(\mat{E} \in \mathbb{R}^{2\times 2}\) and its centre coordinate \(\vec{x}_0 \in \mathbb{R}^2\) such that
\[(\vec{x} - \vec{x}_0)^{\top} \mat{E} \, (\vec{x} - \vec{x}_0) = 1\]Example:
>>> from spatialmath import Ellipse >>> import numpy as np >>> Ellipse(radii=(1,2), theta=0) Ellipse(radii=[1. 2.], centre=(0, 0), theta=0.0) >>> Ellipse(E=np.array([[1, 1], [1, 2]])) Ellipse(radii=[1.618 0.618], centre=(0, 0), theta=1.0172219678978514)
- contains(p)[source]
Test if points are contained by ellipse
- Parameters:
p (arraylike(2), ndarray(2,N)) – point or points to test
- Returns:
true if point is contained within ellipse
- Return type:
bool or list(bool)
Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.contains((3,4)) True >>> e.contains((0,0)) False
- plot(**kwargs)[source]
Plot ellipse
- Parameters:
kwargs – arguments passed to
plot_ellipse()- Returns:
list of artists
- Return type:
_type_
Example:
>>> from spatialmath import Ellipse >>> from spatialmath.base import plotvol2 >>> plotvol2(5) >>> e = Ellipse(E=np.array([[1, 1], [1, 2]])) >>> e.plot() >>> e.plot(filled=True, color='r')
(
Source code,png,hires.png,pdf)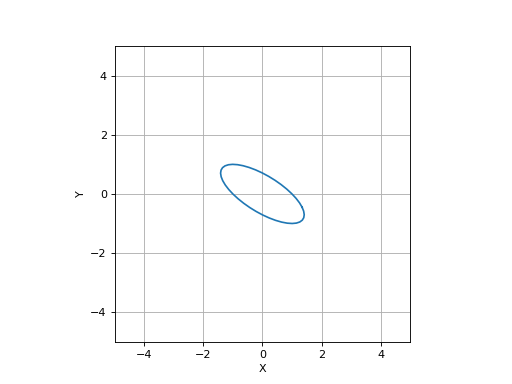
(
Source code,png,hires.png,pdf)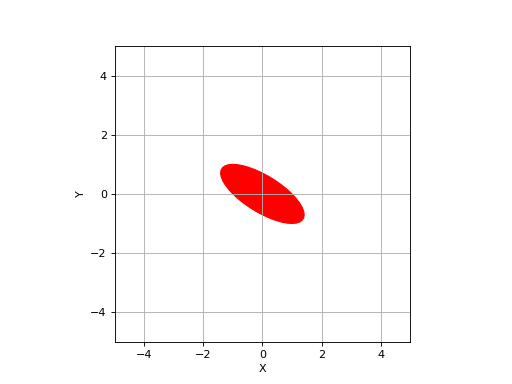
- Seealso:
- points(resolution=20)[source]
Generate perimeter points
- Parameters:
resolution (int, optional) – number of points on circumferance, defaults to 20
- Returns:
set of perimeter points
- Return type:
Points2
Return a set of
resolutionpoints on the perimeter of the ellipse. The perimeter set is not closed, that is, last point != first point.Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.points()[:,:5] # first 5 points array([[4.2298, 4.0396, 3.7477, 3.3825, 2.9799], [3.5793, 4.1469, 4.7001, 5.1848, 5.5535]])
- Seealso:
polygon()ellipse()
- polygon(resolution=10)[source]
Approximate with a polygon
- Parameters:
resolution (int, optional) – number of polygon vertices, defaults to 20
- Returns:
a polygon approximating the ellipse
- Return type:
Polygon2instance
Return a polygon instance with
resolutionvertices. APolygon2`can be used for intersection testing with lines or other polygons.Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.polygon() Polygon2 with 10 vertices
- Seealso:
- property E
Return ellipse matrix
- Returns:
ellipse matrix
- Return type:
ndarray(2,2)
The symmetric matrix \(\mat{E} \in \mathbb{R}^{2\times 2}\) determines the radii and the orientation of the ellipse
\[(\vec{x} - \vec{x}_0)^{\top} \mat{E} \, (\vec{x} - \vec{x}_0) = 1\]Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.E array([[0.8276, 0.3156], [0.3156, 0.4224]])
- property area: float
Area of ellipse
- Returns:
area
- Return type:
float
Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.area 6.283185307179586
- property centre: ndarray[Any, dtype[floating]]
Return ellipse centre
- Returns:
centre of the ellipse
- Return type:
ndarray(2)
Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.centre (3, 4)
- property polynomial
Return ellipse as a polynomial
- Returns:
polynomial
- Return type:
ndarray(6)
An ellipse can be described by \(\vec{e} \in \mathbb{R}^6\) which are the coefficents of a quadratic in \(x\) and \(y\)
\[e_0 x^2 + e_1 y^2 + e_2 xy + e_3 x + e_4 y + e_5 = 0\]Example:
>>> from spatialmath import Ellipse >>> e = Ellipse(radii=(1,2), centre=(3,4), theta=0.5) >>> e.polynomial array([ 0.8276, 0.4224, 0.6311, -7.4901, -5.2724, 21.7799])
- Seealso:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- class Line2(line)[source]
Bases:
objectClass to represent 2D lines
The internal representation is in homogeneous format
\[ax + by + c = 0\]- classmethod General(m, c)[source]
Create line from general line
- Parameters:
m (float) – line gradient
c (float) – line intercept
- Returns:
a 2D line
- Return type:
a Line2 instance
Creates a line from the parameters of the general line \(y = mx + c\).
Note
A vertical line cannot be represented.
- classmethod Join(p1, p2)[source]
Create 2D line from two points
- Parameters:
p1 (array_like(2) or array_like(3)) – point on the line
p2 (array_like(2) or array_like(3)) – another point on the line
- Return type:
Self
The points can be given in Euclidean or homogeneous form.
- contains(p, tol=20)[source]
Test if point is in line
- Parameters:
p1 (array_like(2) or array_like(3)) – point to test
tol (float) – tolerance in units of eps, defaults to 20
- Returns:
True if point lies in the line
- Return type:
bool
- general()[source]
Parameters of general line
- Returns:
parameters of general line (m, c)
- Return type:
ndarray(2)
Return the parameters of a general line \(y = mx + c\).
- intersect(other, tol=20)[source]
Intersection with line
- Parameters:
other (Line2) – another 2D line
tol (float) – tolerance in units of eps, defaults to 20
- Returns:
intersection point in homogeneous form
- Return type:
ndarray(3)
If the lines are parallel then the third element of the returned homogeneous point will be zero (an ideal point).
- intersect_segment(p1, p2, tol=20)[source]
Test for line intersecting line segment
- Parameters:
p1 (array_like(2) or array_like(3)) – start of line segment
p2 (array_like(2) or array_like(3)) – end of line segment
tol (float) – tolerance in units of eps, defaults to 20
- Returns:
True if they intersect
- Return type:
bool
Tests whether the line intersects the line segment defined by endpoints
p1andp2which are given in Euclidean or homogeneous form.
- class LineSegment2(line)[source]
Bases:
Line2- classmethod General(m, c)
Create line from general line
- Parameters:
m (float) – line gradient
c (float) – line intercept
- Returns:
a 2D line
- Return type:
a Line2 instance
Creates a line from the parameters of the general line \(y = mx + c\).
Note
A vertical line cannot be represented.
- classmethod Join(p1, p2)
Create 2D line from two points
- Parameters:
p1 (array_like(2) or array_like(3)) – point on the line
p2 (array_like(2) or array_like(3)) – another point on the line
- Return type:
Self
The points can be given in Euclidean or homogeneous form.
- classmethod TwoPoints(p1, p2)
- Return type:
Self
- __init__(line)
- contains(p, tol=20)
Test if point is in line
- Parameters:
p1 (array_like(2) or array_like(3)) – point to test
tol (float) – tolerance in units of eps, defaults to 20
- Returns:
True if point lies in the line
- Return type:
bool
- contains_polygon_point()
- distance_line_line()
- distance_line_point()
- general()
Parameters of general line
- Returns:
parameters of general line (m, c)
- Return type:
ndarray(2)
Return the parameters of a general line \(y = mx + c\).
- intersect(other, tol=20)
Intersection with line
- Parameters:
other (Line2) – another 2D line
tol (float) – tolerance in units of eps, defaults to 20
- Returns:
intersection point in homogeneous form
- Return type:
ndarray(3)
If the lines are parallel then the third element of the returned homogeneous point will be zero (an ideal point).
- intersect_polygon___line()
- intersect_segment(p1, p2, tol=20)
Test for line intersecting line segment
- Parameters:
p1 (array_like(2) or array_like(3)) – start of line segment
p2 (array_like(2) or array_like(3)) – end of line segment
tol (float) – tolerance in units of eps, defaults to 20
- Returns:
True if they intersect
- Return type:
bool
Tests whether the line intersects the line segment defined by endpoints
p1andp2which are given in Euclidean or homogeneous form.
- plot(**kwargs)
Plot the line using matplotlib
- Parameters:
kwargs – arguments passed to Matplotlib
pyplot.plot- Return type:
None
- points_join()
- class Polygon2(vertices=None, close=True)[source]
Bases:
objectClass to represent 2D (planar) polygons
Note
Uses Matplotlib primitives to perform transformations and intersections.
- __init__(vertices=None, close=True)[source]
Create planar polygon from vertices
- Parameters:
vertices (ndarray(2, N), optional) – vertices of polygon, defaults to None
close (
bool) – closes the polygon, replicates the first vertex, defaults to True
Create a polygon from a set of points provided as columns of the 2D array
vertices. A closed polygon is created so the last vertex should not equal the first.Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)])
Warning
The points must be sequential around the perimeter and counter clockwise, otherwise moments will be negative.
Note
The polygon is represented by a Matplotlib
Path
- animate(T, **kwargs)[source]
Animate a polygon
- Parameters:
T (SE2) – new pose of Polygon
kwargs – options passed to Matplotlib
Patch
- Return type:
None
The plotted polygon is moved to the pose given by
T. The pose is always with respect to the initial vertices when the polygon was constructed. The vertices of the polygon will be updated to reflect what is plotted.If the polygon has already plotted, it will keep the same graphical attributes. If new attributes are given they will replace those given at construction time.
- Seealso:
- area()[source]
Area of polygon
- Returns:
area
- Return type:
float
Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.area() 2.0
- Seealso:
- bbox()[source]
Bounding box of polygon
- Returns:
bounding box as [xmin, xmax, ymin, ymax]
- Return type:
ndarray(4)
Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.bbox() array([1., 2., 3., 4.])
- centroid()[source]
Centroid of polygon
- Returns:
centroid
- Return type:
ndarray(2)
Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.centroid() array([2. , 2.6667])
- Seealso:
- contains(p, radius=0.0)[source]
Test if point is inside polygon
- Parameters:
p (array_like(2)) – point
radius (float, optional) – Add an additional margin to the polygon boundary, defaults to 0.0
- Returns:
True if point is contained by polygon
- Return type:
bool
radiuscan be used to inflate the polygon, or if negative, to deflated it.Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.contains([0, 0]) False >>> p.contains([2, 3]) True
Warning
Returns True if the point is on the edge of the polygon but False if the point is one of the vertices.
Warning
For a polygon with clockwise ordering of vertices the sign of
radiusis flipped.- Seealso:
matplotlib.contains_point()
- edges()[source]
Iterate over polygon edge segments
Creates an iterator that returns pairs of points representing the end points of each segment.
- Return type:
Iterator
- intersects(other)[source]
Test for intersection
- Parameters:
other (Polygon2 or Line2 or list(Polygon2) or list(Line2)) – object to test for intersection
- Returns:
True if the polygon intersects
other- Return type:
bool
- Raises:
ValueError –
Returns true if the polygon intersects the the given polygon or 2D line. If
otheris a list, test against all in the list and return on the first intersection.
- moment(p, q)[source]
Moments of polygon
- Parameters:
p (int) – moment order x
q (int) – moment order y
- Return type:
float
Returns the pq’th moment of the polygon
\[M(p, q) = \sum_{i=0}^{n-1} x_i^p y_i^q\]Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.moment(0, 0) # area 2.0 >>> p.moment(3, 0) 18.0
Note is negative for clockwise perimeter.
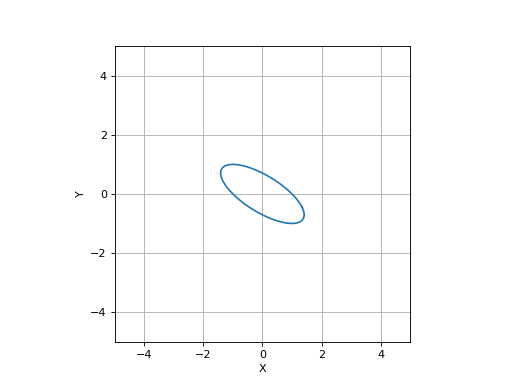
- plot(ax=None, **kwargs)[source]
Plot polygon
- Parameters:
ax (Axes, optional) – axes in which to draw the polygon, defaults to None
kwargs – options passed to Matplotlib
Patch
- Return type:
None
A Matplotlib Patch is created with the passed options
**kwargsand added to the axes.Examples:
>>> from spatialmath.base import plotvol2, plot_polygon >>> plotvol2(5) >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.plot(fill=False) >>> p.plot(facecolor="g", edgecolor="none") # green filled triangle
(
Source code,png,hires.png,pdf)
(
Source code,png,hires.png,pdf)
- Seealso:
animate()matplotlib.PathPatch()
- radius()[source]
Radius of smallest enclosing circle
- Returns:
radius
- Return type:
float
This is the radius of the smalleset circle, centred at the centroid, that encloses all vertices.
Example:
>>> from spatialmath import Polygon2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.radius() 1.3333333333333335
- transformed(T)[source]
A transformed copy of polygon
Returns a new polgyon whose vertices have been transformed by
T.Example:
>>> from spatialmath import Polygon2, SE2 >>> p = Polygon2([(1, 2), (3, 2), (2, 4)]) >>> p.vertices() array([[1., 3., 2.], [2., 2., 4.]]) >>> p.transformed(SE2(10, 0, 0)).vertices() # shift by x+10 array([[11., 13., 12.], [ 2., 2., 4.]])
- vertices(unique=True)[source]
Vertices of polygon
- Parameters:
unique (bool, optional) – return only the unique vertices , defaults to True
- Returns:
vertices
- Return type:
ndarray(2,n)
Returns the set of vertices. The polygon is always closed, that is, the first and last vertices are the same. The
uniqueoption does not include the last vertex.Example:
{kind=link}
{kind=link}
{kind=link}
{kind=link}