Transforms in 2D
These functions create and manipulate 2D rotation matrices and rigid-body transformations as 2x2 SO(2) matrices and 3x3 SE(2) matrices respectively. These matrices are represented as 2D NumPy arrays.
Vector arguments are what numpy refers to as array_like and can be a list,
tuple, numpy array, numpy row vector or numpy column vector.
- ICP2d(reference, source, T=None, max_iter=20, min_delta_err=0.0001)[source]
Iterated closest point (ICP) in 2D
- Parameters:
reference (ndarray(2,N)) – points (columns) to which the source points are to be aligned
source (ndarray(2,M)) – points (columns) to align to the reference set of points
T (ndarray(3,3), optional) – initial pose , defaults to None
max_iter (int, optional) – max number of iterations, defaults to 20
min_delta_err (float, optional) – min_delta_err, defaults to 1e-4
- Returns:
pose of source point cloud relative to the reference point cloud
- Return type:
SE2Array
Uses the iterative closest point algorithm to find the transformation that transforms the source point cloud to align with the reference point cloud, which minimizes the sum of squared errors between nearest neighbors in the two point clouds.
Note
Point correspondence is not required and the two point clouds do not have to have the same number of points.
Warning
The point cloud argument order is reversed compared to
points2tr().- Seealso:
points2tr()
- ishom2(T, check=False, tol=20)[source]
Test if matrix belongs to SE(2)
- Parameters:
T (ndarray(3,3)) – SE(2) matrix to test
check (bool) – check validity of rotation submatrix
tol (
float) – Tolerance in units of eps for zero-rotation case, defaults to 20
- Type:
float
- Returns:
whether matrix is an SE(2) homogeneous transformation matrix
- Return type:
bool
ishom2(T)is True if the argumentTis of dimension 3x3ishom2(T, check=True)as above, but also checks orthogonality of the rotation sub-matrix and validitity of the bottom row.
>>> from spatialmath.base import * >>> import numpy as np >>> T = np.array([[1, 0, 3], [0, 1, 4], [0, 0, 1]]) >>> ishom2(T) True >>> T = np.array([[1, 1, 3], [0, 1, 4], [0, 0, 1]]) # invalid SE(2) >>> ishom2(T) # a quick check says it is an SE(2) True >>> ishom2(T, check=True) # but if we check more carefully... False >>> R = np.array([[1, 0], [0, 1]]) >>> ishom2(R) False
- Seealso:
isR, isrot2, ishom, isvec
- isrot2(R, check=False, tol=20)[source]
Test if matrix belongs to SO(2)
- Parameters:
R (ndarray(3,3)) – SO(2) matrix to test
check (bool) – check validity of rotation submatrix
tol (
float) – Tolerance in units of eps for zero-rotation case, defaults to 20
- Type:
float
- Returns:
whether matrix is an SO(2) rotation matrix
- Return type:
bool
isrot2(R)is True if the argumentRis of dimension 2x2isrot2(R, check=True)as above, but also checks orthogonality of the rotation matrix.
>>> from spatialmath.base import * >>> import numpy as np >>> T = np.array([[1, 0, 3], [0, 1, 4], [0, 0, 1]]) >>> isrot2(T) False >>> R = np.array([[1, 0], [0, 1]]) >>> isrot2(R) True >>> R = np.array([[1, 1], [0, 1]]) # invalid SO(2) >>> isrot2(R) # a quick check says it is an SO(2) True >>> isrot2(R, check=True) # but if we check more carefully... False
- Seealso:
isR, ishom2, isrot
- points2tr2(p1, p2)[source]
SE(2) transform from corresponding points
- Parameters:
p1 (array_like(2,N)) – first set of points
p2 (array_like(2,N)) – second set of points
- Returns:
transform from
p1top2- Return type:
ndarray(3,3)
Compute an SE(2) matrix that transforms the point set
p1top2. p1 and p2 must have the same number of columns, and columns correspond to the same point.- Seealso:
- pos2tr2(x, y=None)[source]
Create a translational SE(2) matrix
- Parameters:
x (float) – translation along X-axis
y (float) – translation along Y-axis
- Returns:
SE(2) matrix
- Return type:
ndarray(3,3)
T = pos2tr2([X, Y])is an SE(2) homogeneous transform (3x3) representing a pure translation.T = pos2tr2( V )as above but the translation is given by a 2-element list, dict, or a numpy array, row or column vector.
File "<input>", line 1, in <module> NameError: name 'pos2tr2' is not defined Traceback (most recent call last): File "<input>", line 1, in <module> NameError: name 'pos2tr2' is not defined
- rot2(theta, unit='rad')[source]
Create SO(2) rotation
- Parameters:
theta (float) – rotation angle
unit (str) – angular units: ‘rad’ [default], or ‘deg’
- Returns:
SO(2) rotation matrix
- Return type:
ndarray(2,2)
rot2(θ)is an SO(2) rotation matrix (2x2) representing a rotation of θ radians.rot2(θ, 'deg')as above but θ is in degrees.
>>> from spatialmath.base import * >>> rot2(0.3) array([[ 0.9553, -0.2955], [ 0.2955, 0.9553]]) >>> rot2(45, 'deg') array([[ 0.7071, -0.7071], [ 0.7071, 0.7071]])
- tr2jac2(T)[source]
SE(2) Jacobian matrix
- Parameters:
T (ndarray(3,3)) – SE(2) matrix
- Returns:
Jacobian matrix
- Return type:
ndarray(3,3)
Computes an Jacobian matrix that maps spatial velocity between two frames defined by an SE(2) matrix.
tr2jac2(T)is a Jacobian matrix (3x3) that maps spatial velocity or differential motion from frame {B} to frame {A} where the pose of {B} elative to {A} is represented by the homogeneous transform T = \({}^A {\bf T}_B\).>>> from spatialmath.base import * >>> T = trot2(0.3, t=[4,5]) >>> tr2jac2(T) array([[ 0.9553, -0.2955, 0. ], [ 0.2955, 0.9553, 0. ], [ 0. , 0. , 1. ]])
- Reference:
Robotics, Vision & Control for Python, Section 3.1, P. Corke, Springer 2023.
- SymPy:
supported
- tr2pos2(T)[source]
Extract translation from SE(2) matrix
- Parameters:
x (ndarray(3,3)) – SE(2) transform matrix
- Returns:
translation elements of SE(2) matrix
- Return type:
ndarray(2)
t = tr2pos2(T)is the translational part of the SE(3) matrixTas a 2-element NumPy array.
- tr2xyt(T, unit='rad')[source]
Convert SE(2) to x, y, theta
- Parameters:
T (ndarray(3,3)) – SE(2) matrix
unit (str) – angular units: ‘rad’ [default], or ‘deg’
- Returns:
[x, y, θ]
- Return type:
ndarray(3)
tr2xyt(T)is a vector giving the equivalent 2D translation and rotation for this SO(2) matrix.
>>> from spatialmath.base import * >>> T = xyt2tr([1, 2, 0.3]) >>> T array([[ 0.9553, -0.2955, 1. ], [ 0.2955, 0.9553, 2. ], [ 0. , 0. , 1. ]]) >>> tr2xyt(T) array([1. , 2. , 0.3])
- Seealso:
trot2
- tradjoint2(T)[source]
Adjoint matrix in 2D
- Parameters:
T (ndarray(3,3) or ndarray(2,2)) – SE(2) or SO(2) matrix
- Returns:
adjoint matrix
- Return type:
ndarray(3,3) or ndarray(1,1)
Computes an adjoint matrix that maps the Lie algebra between frames.
where \(\mat{T} \in \SE2\).
tr2jac2(T)is an adjoint matrix (6x6) that maps spatial velocity or differential motion between frame {B} to frame {A} which are attached to the same moving body. The pose of {B} relative to {A} is represented by the homogeneous transform T = \({}^A {\bf T}_B\).File "<input>", line 1, in <module> NameError: name 'trot2' is not defined Traceback (most recent call last): File "<input>", line 1, in <module> NameError: name 'tr2adjoint2' is not defined
- Reference:
Robotics, Vision & Control for Python, Section 3.1, P. Corke, Springer 2023.
`Lie groups for 2D and 3D Transformations <http://ethaneade.com/lie.pdf>_
- SymPy:
supported
- tranimate2(T, **kwargs)[source]
Animate a 2D coordinate frame
- Parameters:
T (
ndarray[Any,dtype[TypeVar(ScalarType, bound=generic, covariant=True)]]) – an SE(2) or SO(2) pose to be displayed as coordinate framenframes (int) – number of steps in the animation [defaault 100]
repeat (bool) – animate in endless loop [default False]
interval (int) – number of milliseconds between frames [default 50]
movie (str) – name of file to write MP4 movie into
- Type:
ndarray(3,3) or ndarray(2,2)
Animates a 2D coordinate frame moving from the world frame to a frame represented by the SO(2) or SE(2) matrix to the current axes.
If no current figure, one is created
If current figure, but no axes, a 3d Axes is created
Examples:
tranimate2(transl(1,2)@trot2(1), frame=’A’, arrow=False, dims=[0, 5]) tranimate2(transl(1,2)@trot2(1), frame=’A’, arrow=False, dims=[0, 5], movie=’spin.mp4’)
- transl2(x, y=None)[source]
Create SE(2) pure translation, or extract translation from SE(2) matrix
Create a translational SE(2) matrix
- Parameters:
x (float) – translation along X-axis
y (float) – translation along Y-axis
- Returns:
SE(2) matrix
- Return type:
ndarray(3,3)
T = transl2([X, Y])is an SE(2) homogeneous transform (3x3) representing a pure translation.T = transl2( V )as above but the translation is given by a 2-element list, dict, or a numpy array, row or column vector.
>>> from spatialmath.base import * >>> import numpy as np >>> transl2(3, 4) array([[1., 0., 3.], [0., 1., 4.], [0., 0., 1.]]) >>> transl2([3, 4]) array([[1., 0., 3.], [0., 1., 4.], [0., 0., 1.]]) >>> transl2(np.array([3, 4])) array([[1., 0., 3.], [0., 1., 4.], [0., 0., 1.]])
Extract the translational part of an SE(2) matrix
- Parameters:
x (ndarray(3,3)) – SE(2) transform matrix
- Returns:
translation elements of SE(2) matrix
- Return type:
ndarray(2)
t = transl2(T)is the translational part of the SE(3) matrixTas a 2-element NumPy array.
>>> from spatialmath.base import * >>> import numpy as np >>> T = np.array([[1, 0, 3], [0, 1, 4], [0, 0, 1]]) >>> transl2(T) array([3, 4])
Note
This function is compatible with the MATLAB version of the Toolbox. It is unusual/weird in doing two completely different things inside the one function.
- trexp2(S, theta=None, check=True)[source]
Exponential of so(2) or se(2) matrix
- Parameters:
- Returns:
matrix exponential in SE(2) or SO(2)
- Return type:
ndarray(3,3) or ndarray(2,2)
- Raises:
ValueError – bad argument
An efficient closed-form solution of the matrix exponential for arguments that are se(2) or so(2).
For se(2) the results is an SE(2) homogeneous transformation matrix:
trexp2(Σ)is the matrix exponential of the se(2) elementΣwhich is a 3x3 augmented skew-symmetric matrix.trexp2(Σ, θ)as above but for an se(3) motion of Σθ, whereΣmust represent a unit-twist, ie. the rotational component is a unit-norm skew-symmetric matrix.trexp2(S)is the matrix exponential of the se(2) elementSrepresented as a 3-vector which can be considered a screw motion.trexp2(S, θ)as above but for an se(2) motion of Sθ, whereSmust represent a unit-twist, ie. the rotational component is a unit-norm skew-symmetric matrix.
>>> from spatialmath.base import * >>> trexp2(skew(1)) array([[ 0.5403, -0.8415], [ 0.8415, 0.5403]]) >>> trexp2(skew(1), 2) # revolute unit twist array([[-0.4161, -0.9093], [ 0.9093, -0.4161]]) >>> trexp2(1) array([[ 0.5403, -0.8415], [ 0.8415, 0.5403]]) >>> trexp2(1, 2) # revolute unit twist array([[-0.4161, -0.9093], [ 0.9093, -0.4161]])
For so(2) the results is an SO(2) rotation matrix:
trexp2(Ω)is the matrix exponential of the so(3) elementΩwhich is a 2x2 skew-symmetric matrix.trexp2(Ω, θ)as above but for an so(3) motion of Ωθ, whereΩis unit-norm skew-symmetric matrix representing a rotation axis and a rotation magnitude given byθ.trexp2(ω)is the matrix exponential of the so(2) elementωexpressed as a 1-vector.trexp2(ω, θ)as above but for an so(3) motion of ωθ whereωis a unit-norm vector representing a rotation axis and a rotation magnitude given byθ.ωis expressed as a 1-vector.
>>> from spatialmath.base import * >>> trexp2(skewa([1, 2, 3])) array([[-0.99 , -0.1411, -1.2796], [ 0.1411, -0.99 , 0.7574], [ 0. , 0. , 1. ]]) >>> trexp2(skewa([1, 0, 0]), 2) # prismatic unit twist array([[ 1., -0., 2.], [ 0., 1., 0.], [ 0., 0., 1.]]) >>> trexp2([1, 2, 3]) array([[-0.99 , -0.1411, -1.2796], [ 0.1411, -0.99 , 0.7574], [ 0. , 0. , 1. ]]) >>> trexp2([1, 0, 0], 2) array([[ 1., -0., 2.], [ 0., 1., 0.], [ 0., 0., 1.]])
- Seealso:
trlog, trexp2
- trinterp2(start, end, s, shortest=True)[source]
Interpolate SE(2) or SO(2) matrices
- Parameters:
start (ndarray(3,3) or ndarray(2,2) or None) – initial SE(2) or SO(2) matrix value when s=0, if None then identity is used
end (ndarray(3,3) or ndarray(2,2)) – final SE(2) or SO(2) matrix, value when s=1
s (float) – interpolation coefficient, range 0 to 1
shortest (bool, default to True) – take the shortest path along the great circle for the rotation
- Returns:
interpolated SE(2) or SO(2) matrix value
- Return type:
ndarray(3,3) or ndarray(2,2)
- Raises:
ValueError – bad arguments
trinterp2(None, T, S)is an SE(2) matrix interpolated between identity when S`=0 and `T when `S`=1.trinterp2(T0, T1, S)as above but interpolated between T0 when S`=0 and `T1 when `S`=1.trinterp2(None, R, S)is an SO(2) matrix interpolated between identity when S`=0 and `R when `S`=1.trinterp2(R0, R1, S)as above but interpolated between R0 when S`=0 and `R1 when `S`=1.
Note
Rotation angle is linearly interpolated.
>>> from spatialmath.base import * >>> T1 = transl2(1, 2) >>> T2 = transl2(3, 4) >>> trinterp2(T1, T2, 0) array([[ 1., -0., 1.], [ 0., 1., 2.], [ 0., 0., 1.]]) >>> trinterp2(T1, T2, 1) array([[ 1., -0., 3.], [ 0., 1., 4.], [ 0., 0., 1.]]) >>> trinterp2(T1, T2, 0.5) array([[ 1., -0., 2.], [ 0., 1., 3.], [ 0., 0., 1.]]) >>> trinterp2(None, T2, 0) array([[ 1., -0., 0.], [ 0., 1., 0.], [ 0., 0., 1.]]) >>> trinterp2(None, T2, 1) array([[ 1., -0., 3.], [ 0., 1., 4.], [ 0., 0., 1.]]) >>> trinterp2(None, T2, 0.5) array([[ 1. , -0. , 1.5], [ 0. , 1. , 2. ], [ 0. , 0. , 1. ]])
- Seealso:
- trinv2(T)[source]
Invert an SE(2) matrix
- Parameters:
T (ndarray(3,3)) – SE(2) matrix
- Returns:
inverse of SE(2) matrix
- Return type:
ndarray(3,3)
- Raises:
ValueError – bad arguments
Computes an efficient inverse of an SE(2) matrix:
\(\begin{pmatrix} {\bf R} & t \\ 0\,0 & 1 \end{pmatrix}^{-1} = \begin{pmatrix} {\bf R}^T & -{\bf R}^T t \\ 0\, 0 & 1 \end{pmatrix}\)
>>> from spatialmath.base import * >>> T = trot2(0.3, t=[4,5]) >>> trinv2(T) array([[ 0.9553, 0.2955, -5.2989], [-0.2955, 0.9553, -3.5946], [ 0. , 0. , 1. ]]) >>> T @ trinv2(T) array([[ 1., -0., 0.], [-0., 1., 0.], [ 0., 0., 1.]])
- SymPy:
supported
- trlog2(T, twist=False, check=True, tol=20)[source]
Logarithm of SO(2) or SE(2) matrix
- Parameters:
T (ndarray(3,3) or ndarray(2,2)) – SE(2) or SO(2) matrix
check (bool) – check that matrix is valid
twist (bool) – return a twist vector instead of matrix [default]
tol (
float) – Tolerance in units of eps for zero-rotation case, defaults to 20
- Type:
float
- Returns:
logarithm
- Return type:
ndarray(3,3) or ndarray(3); or ndarray(2,2) or ndarray(1)
- Raises:
ValueError – bad argument
An efficient closed-form solution of the matrix logarithm for arguments that are SO(2) or SE(2).
trlog2(R)is the logarithm of the passed rotation matrixRwhich will be 2x2 skew-symmetric matrix. The equivalent vector fromvex()is parallel to rotation axis and its norm is the amount of rotation about that axis.trlog(T)is the logarithm of the passed homogeneous transformation matrixTwhich will be 3x3 augumented skew-symmetric matrix. The equivalent vector fromvexa()is the twist vector (6x1) comprising [v w].
>>> from spatialmath.base import * >>> trlog2(trot2(0.3)) array([[ 0. , -0.3, 0. ], [ 0.3, 0. , 0. ], [ 0. , 0. , 0. ]]) >>> trlog2(trot2(0.3), twist=True) array([0. , 0. , 0.3]) >>> trlog2(rot2(0.3)) array([[ 0. , -0.3], [ 0.3, 0. ]]) >>> trlog2(rot2(0.3), twist=True) 0.3
- trnorm2(T)[source]
Normalize an SO(2) or SE(2) matrix
- Parameters:
T (ndarray(3,3) or ndarray(2,2)) – SE(2) or SO(2) matrix
- Returns:
normalized SE(2) or SO(2) matrix
- Return type:
ndarray(3,3) or ndarray(2,2)
- Raises:
ValueError – bad arguments
trnorm(R)is guaranteed to be a proper orthogonal matrix rotation matrix (2,2) which is close to the input matrix R (2,2).trnorm(T)as above but the rotational submatrix of the homogeneous transformation T (3,3) is normalised while the translational part is unchanged.
The steps in normalization are:
If \(\mathbf{R} = [a, b]\)
Form unit vectors :math:`hat{b}
Form the orthogonal planar vector \(\hat{a} = [\hat{b}_y -\hat{b}_x]\)
Form the normalized SO(2) matrix \(\mathbf{R} = [\hat{a}, \hat{b}]\)
File "<input>", line 1, in <module> NameError: name 'T' is not defined Traceback (most recent call last): File "<input>", line 1, in <module> NameError: name 'T' is not defined Traceback (most recent call last): File "<input>", line 1, in <module> NameError: name 'T' is not defined Traceback (most recent call last): File "<input>", line 1, in <module> NameError: name 'trnorm2' is not defined Traceback (most recent call last): File "<input>", line 1, in <module> NameError: name 'T' is not defined
Note
Only the direction of a-vector (the z-axis) is unchanged.
Used to prevent finite word length arithmetic causing transforms to become ‘unnormalized’, ie. determinant \(\ne 1\).
- trot2(theta, unit='rad', t=None)[source]
Create SE(2) pure rotation
- Parameters:
theta (
float) – rotation angle about X-axisunit (str) – angular units: ‘rad’ [default], or ‘deg’
t (array_like(2)) – 2D translation vector, defaults to [0,0]
- Returns:
3x3 homogeneous transformation matrix
- Return type:
ndarray(3,3)
trot2(θ)is a homogeneous transformation (3x3) representing a rotation of θ radians.trot2(θ, 'deg')as above but θ is in degrees.
>>> from spatialmath.base import * >>> trot2(0.3) array([[ 0.9553, -0.2955, 0. ], [ 0.2955, 0.9553, 0. ], [ 0. , 0. , 1. ]]) >>> trot2(45, 'deg', t=[1,2]) array([[ 0.7071, -0.7071, 1. ], [ 0.7071, 0.7071, 2. ], [ 0. , 0. , 1. ]])
Note
By default, the translational component is zero but it can be set to a non-zero value.
- Seealso:
xyt2tr
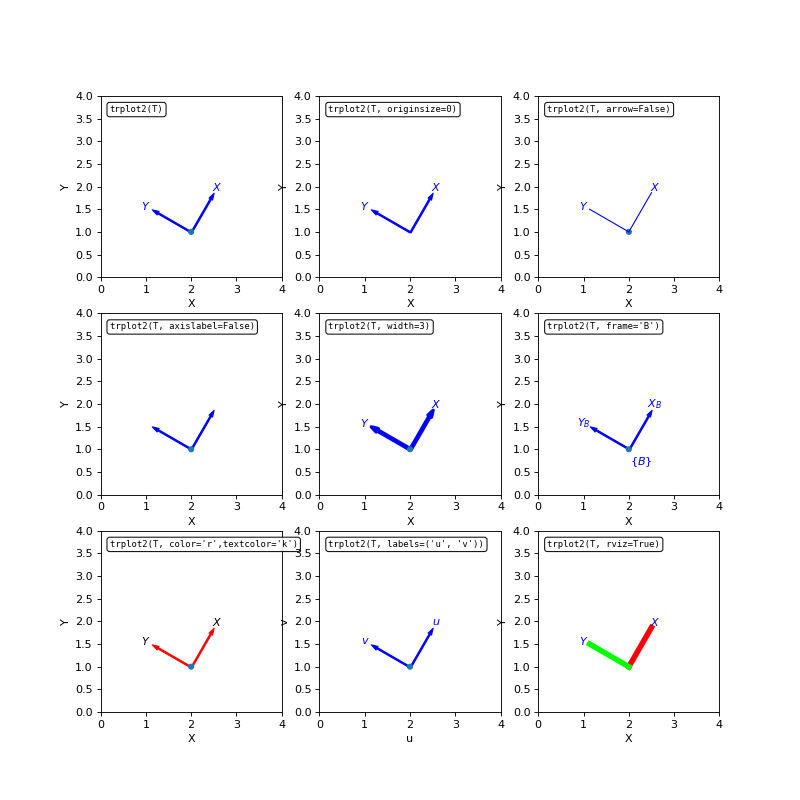
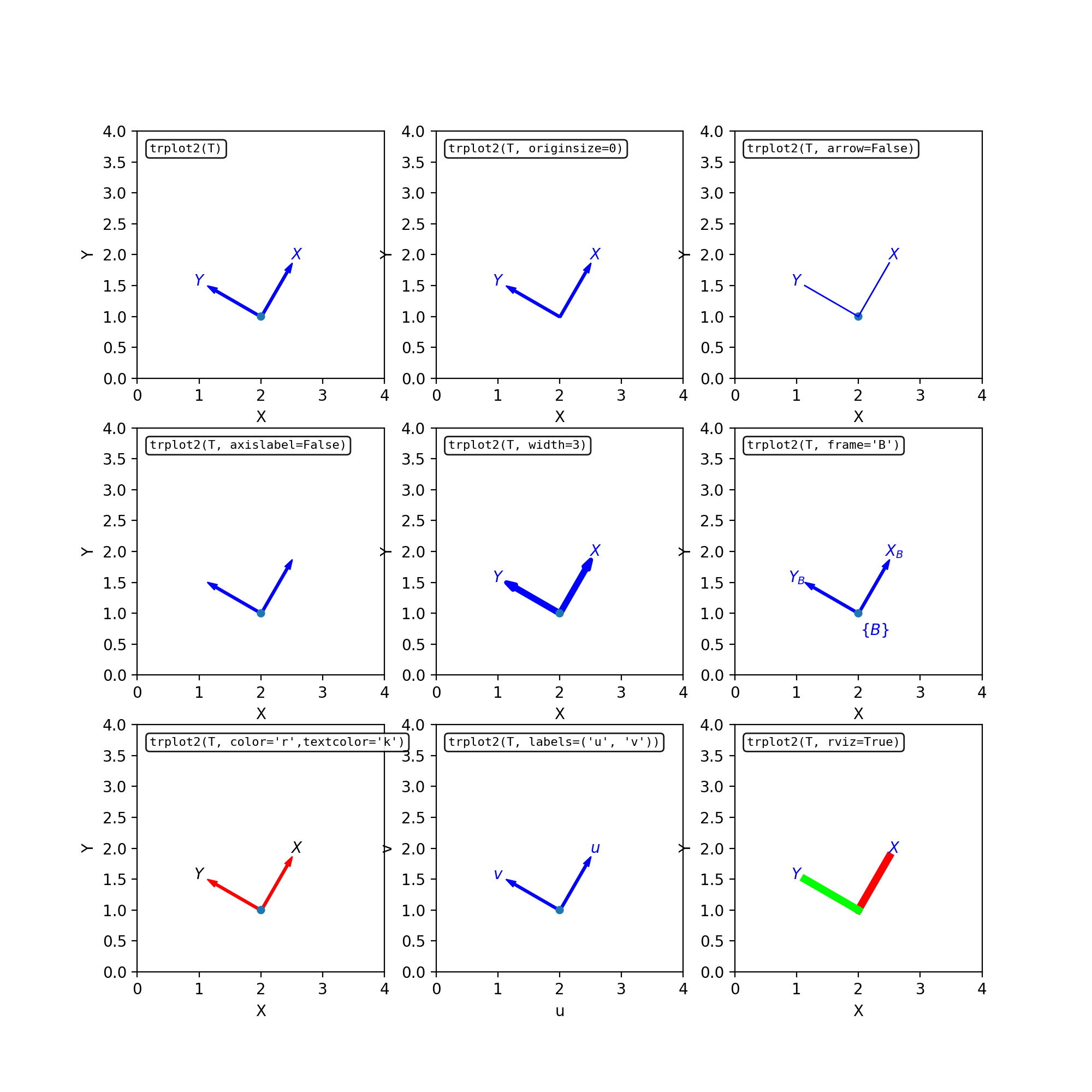
- trplot2(T, color='blue', frame=None, axislabel=True, axissubscript=True, textcolor=None, labels=('X', 'Y'), length=1, arrow=True, originsize=20, rviz=False, ax=None, block=None, dims=None, wtl=0.2, width=1, d1=0.1, d2=1.15, **kwargs)[source]
Plot a 2D coordinate frame
- Parameters:
T (
ndarray[Any,dtype[TypeVar(ScalarType, bound=generic, covariant=True)]]) – an SE(3) or SO(3) pose to be displayed as coordinate framecolor (str) – color of the lines defining the frame
textcolor (str) – color of text labels for the frame, default color of lines above
frame (str) – label the frame, name is shown below the frame and as subscripts on the frame axis labels
axislabel (bool) – display labels on axes, default True
axissubscript (bool) – display subscripts on axis labels, default True
labels (2-tuple of strings) – labels for the axes, defaults to X and Y
length (float) – length of coordinate frame axes, default 1
arrow (bool) – show arrow heads, default True
ax (Axes3D reference) – the axes to plot into, defaults to current axes
block (bool) – run the GUI main loop until all windows are closed, default None
dims (array_like(4)) – dimension of plot volume as [xmin, xmax, ymin, ymax]
wtl (float) – width-to-length ratio for arrows, default 0.2
rviz (bool) – show Rviz style arrows, default False
width (float) – width of lines, default 1
d1 (float) – distance of frame axis label text from origin, default 0.05
d2 (float) – distance of frame label text from origin, default 1.15
- Type:
ndarray(3,3) or ndarray(2,2)
- Returns:
axes containing the frame
- Return type:
AxesSubplot
- Raises:
ValueError – bad argument
Adds a 2D coordinate frame represented by the SO(2) or SE(2) matrix to the current axes.
The appearance of the coordinate frame depends on many parameters:
coordinate axes depend on:
colorof axeswidthof linelengthof linearrowif True [default] draw the axis with an arrow head
coordinate axis labels depend on:
axislabelif True [default] label the axis, default labels are X, Y, Zlabels2-list of alternative axis labelstextcolorwhich defaults tocoloraxissubscriptif True [default] add the frame labelframeas a subscript
for each axis label
coordinate frame label depends on:
frame the label placed inside {…} near the origin of the frame
a dot at the origin
originsizesize of the dot, if zero no dotorigincolorcolor of the dot, defaults tocolorIf no current figure, one is created
If current figure, but no axes, a 3d Axes is created
Examples:
trplot2(T, frame='A') trplot2(T, frame='A', color='green') trplot2(T1, 'labels', 'AB');
(
Source code,png,hires.png,pdf)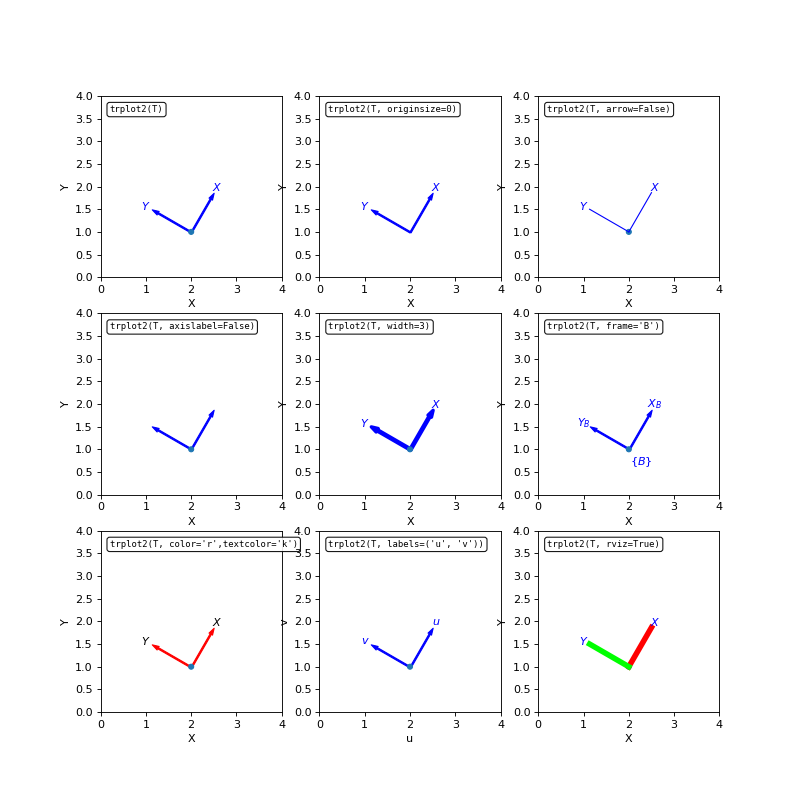
- SymPy:
not supported
- Seealso:
tranimate2()plotvol2()axes_logic()
{kind=link}
{kind=link}
- trprint2(T, label='', file=<_io.TextIOWrapper name='<stdout>' mode='w' encoding='utf-8'>, fmt='{:.3g}', unit='deg')[source]
Compact display of SE(2) or SO(2) matrices
- Parameters:
T (ndarray(3,3) or ndarray(2,2)) – matrix to format
label (str) – text label to put at start of line
file (file object) – file to write formatted string to
fmt (str) – conversion format for each number
unit (str) – angular units: ‘rad’ [default], or ‘deg’
- Returns:
formatted string
- Return type:
str
The matrix is formatted and written to
fileand the string is returned. To suppress writing to a file, setfile=None.trprint2(R)displays the SO(2) rotation matrix in a compact single-line format and returns the string:[LABEL:] θ UNIT
trprint2(T)displays the SE(2) homogoneous transform in a compact single-line format and returns the string:[LABEL:] [t=X, Y;] θ UNIT
>>> from spatialmath.base import * >>> T = transl2(1,2) @ trot2(0.3) >>> trprint2(T, file=None, label='T') 'T: t = 1, 2; 17.2°' >>> trprint2(T, file=None, label='T', fmt='{:8.4g}') 'T: t = 1, 2; 17.19°'
Note
Default formatting is for compact display of data
For tabular data set
fmtto a fixed width format such asfmt='{:.3g}'
- Seealso:
trprint
- xyt2tr(xyt, unit='rad')[source]
Create SE(2) pure rotation
- Parameters:
xyt (array_like(3)) – 2d translation and rotation
unit (str) – angular units: ‘rad’ [default], or ‘deg’
- Returns:
SE(2) matrix
- Return type:
ndarray(3,3)
xyt2tr([x,y,θ])is a homogeneous transformation (3x3) representing a rotation of θ radians and a translation of (x,y).
>>> from spatialmath.base import * >>> xyt2tr([1,2,0.3]) array([[ 0.9553, -0.2955, 1. ], [ 0.2955, 0.9553, 2. ], [ 0. , 0. , 1. ]]) >>> xyt2tr([1,2,45], 'deg') array([[ 0.7071, -0.7071, 1. ], [ 0.7071, 0.7071, 2. ], [ 0. , 0. , 1. ]])
- Seealso:
tr2xyt